
OBJECTIVE:
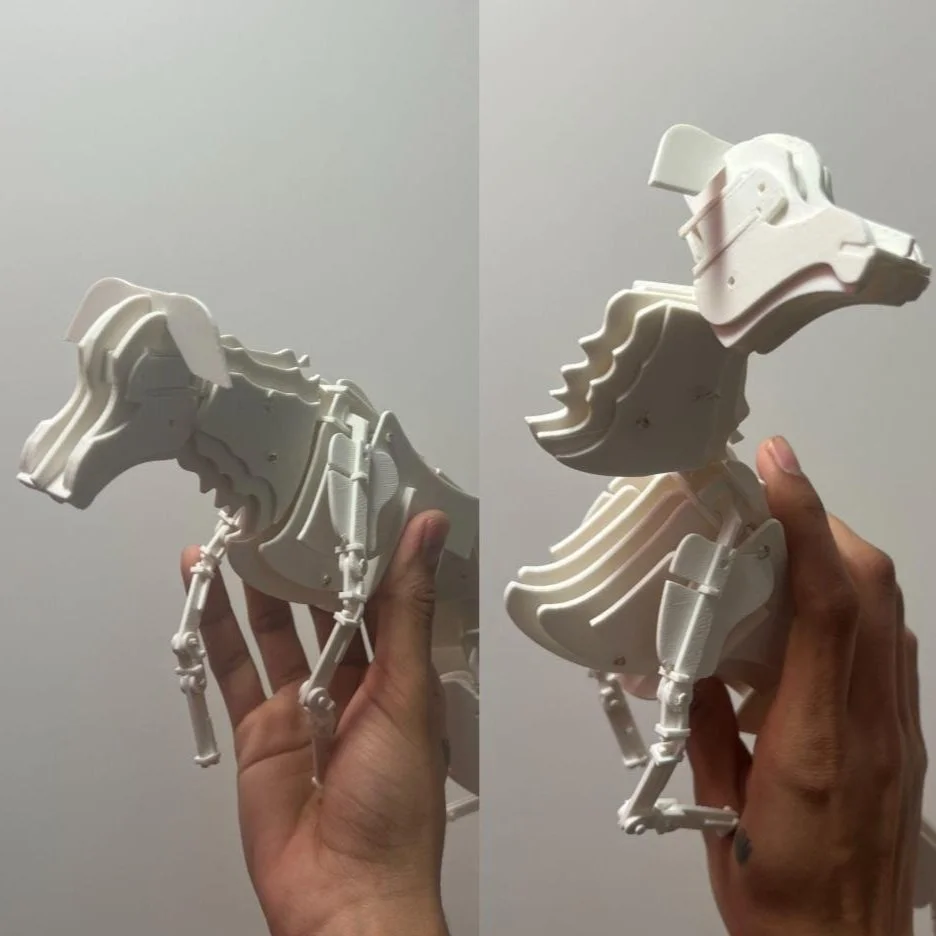
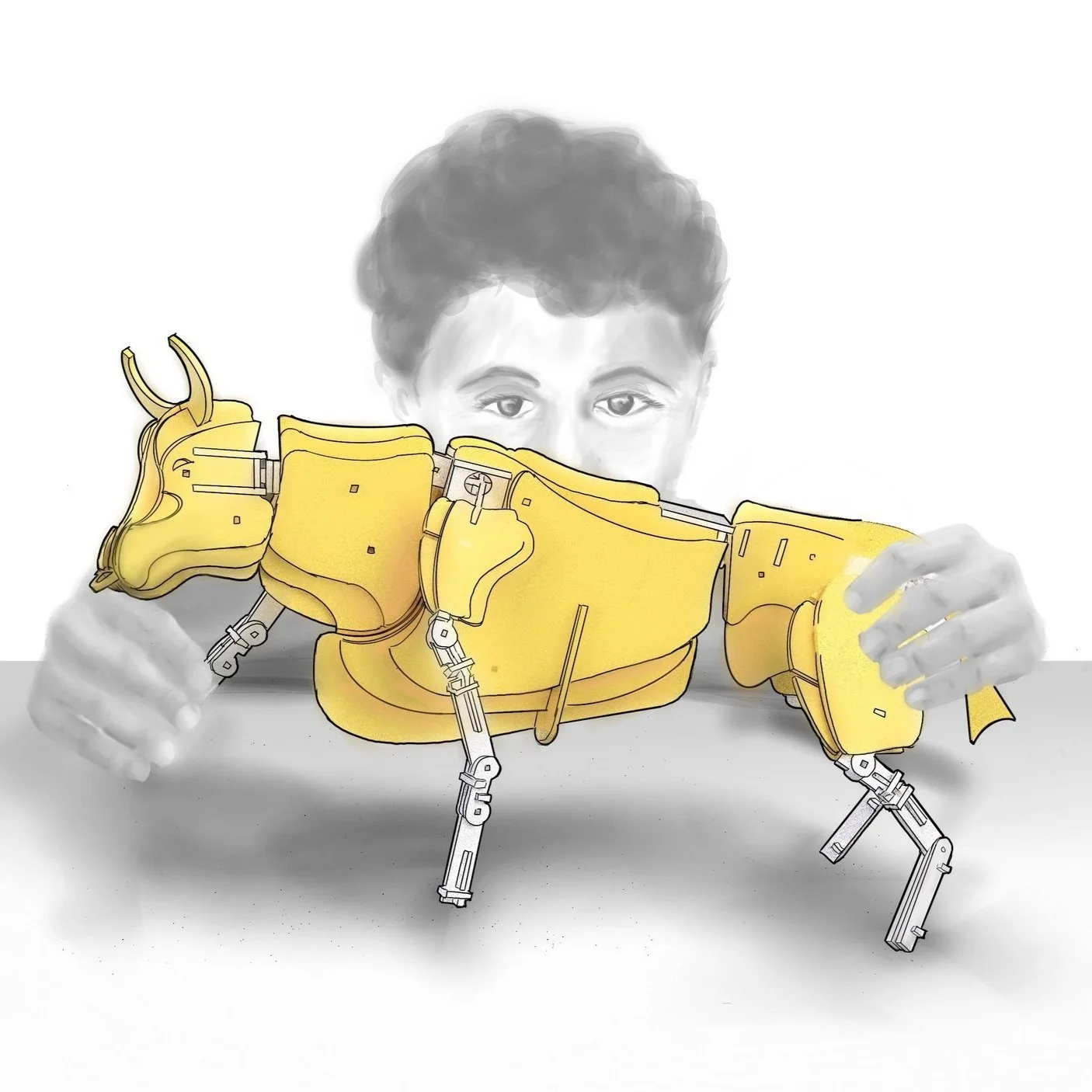
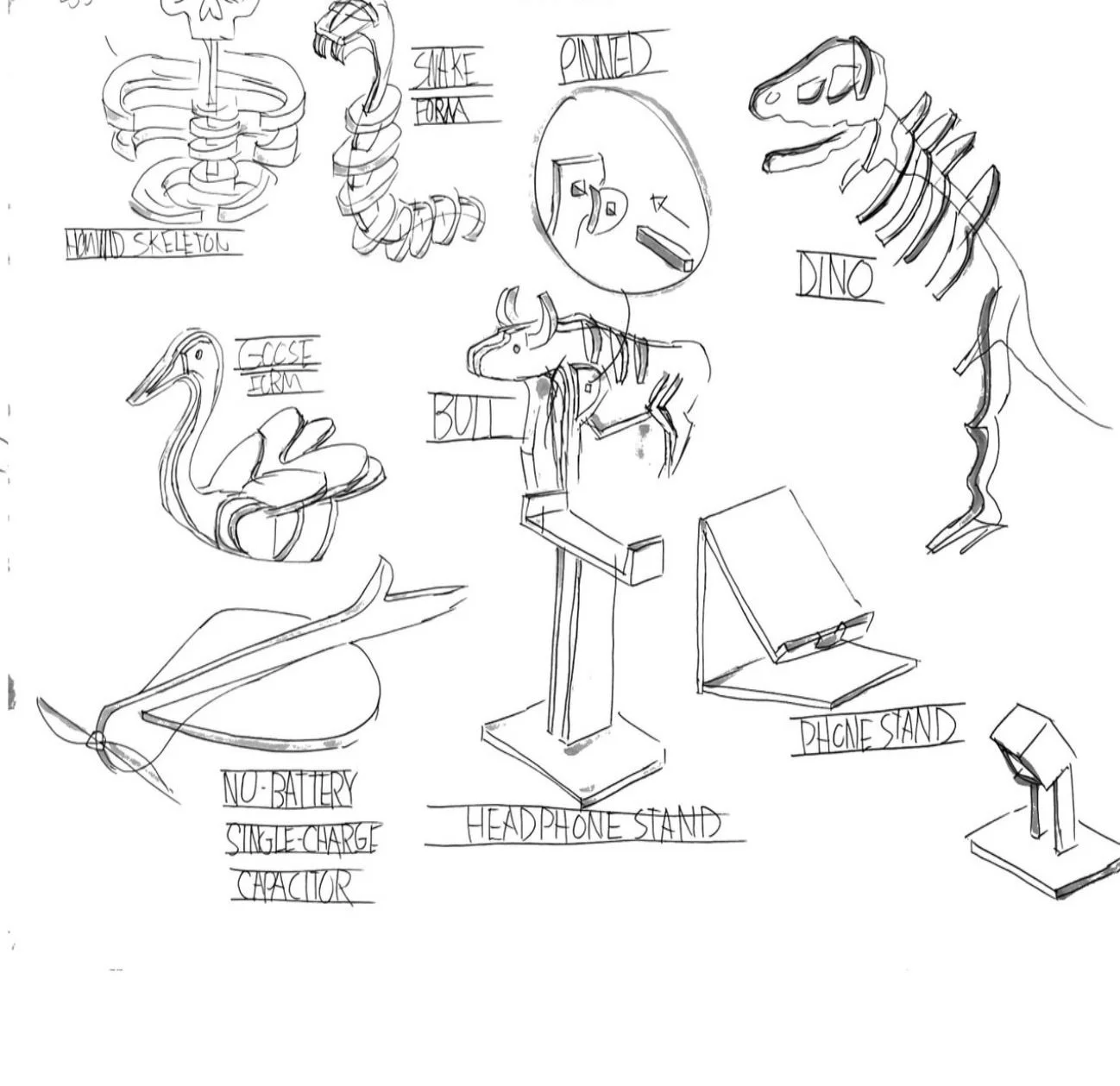
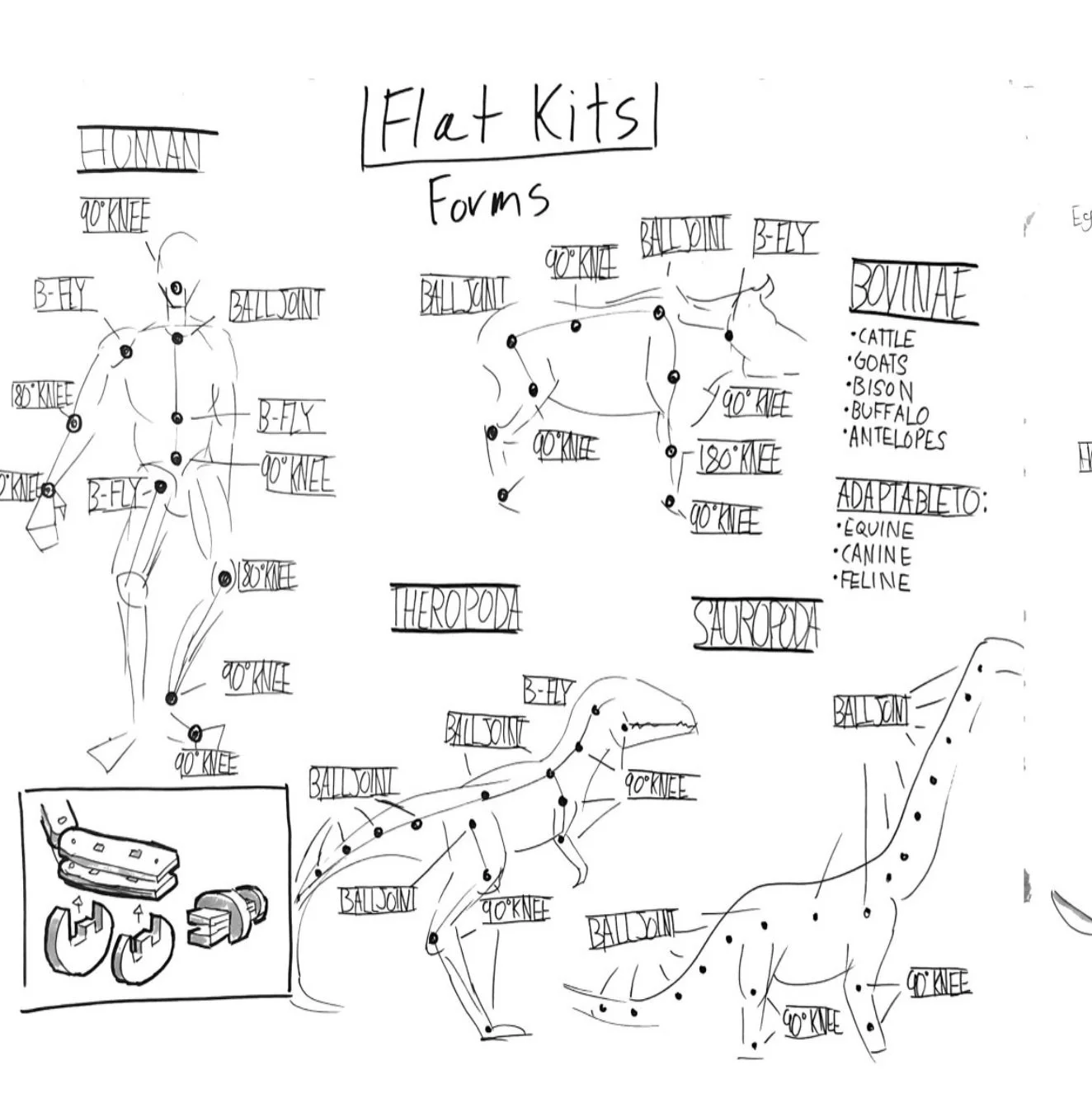
DESIGN A MODULAR AND highly articulated OPEN-SOURCE ACTION FIGURE



OBJECTIVE:
DESIGN A MODULAR AND highly articulated OPEN-SOURCE ACTION FIGURE